强化学习(12):Actor-Critic 方法

Actor-Critic 的基本结构
前一篇已经看到,引入基线之后,策略梯度的更新信号可以从完整回报 $G_t$ 变成
$$ G_t - V_\pi(s_t) $$这一步虽然能够降低方差,但也带来了新的学习对象:状态价值函数 $V_\pi(s_t)$。如果价值函数需要被估计,那么策略梯度方法中就自然出现了两类参数化函数。
第一类是策略函数。它负责根据当前状态给出动作分布,通常写作
$$ \pi(a\mid s;\boldsymbol{\theta}) $$其中,$\boldsymbol{\theta}$ 是策略参数。这个部分通常称为行动器(Actor)。Actor 的作用是学习策略,并在与环境交互时根据当前状态选择动作。
第二类是价值函数。它负责估计当前策略下状态的长期价值,通常写作
$$ V(s;\mathbf{w}) $$其中,$\mathbf{w}$ 是价值函数参数。这个部分通常称为评判器(Critic)。Critic 的作用是评价当前状态或当前动作的结果,为策略更新提供更稳定的学习信号。
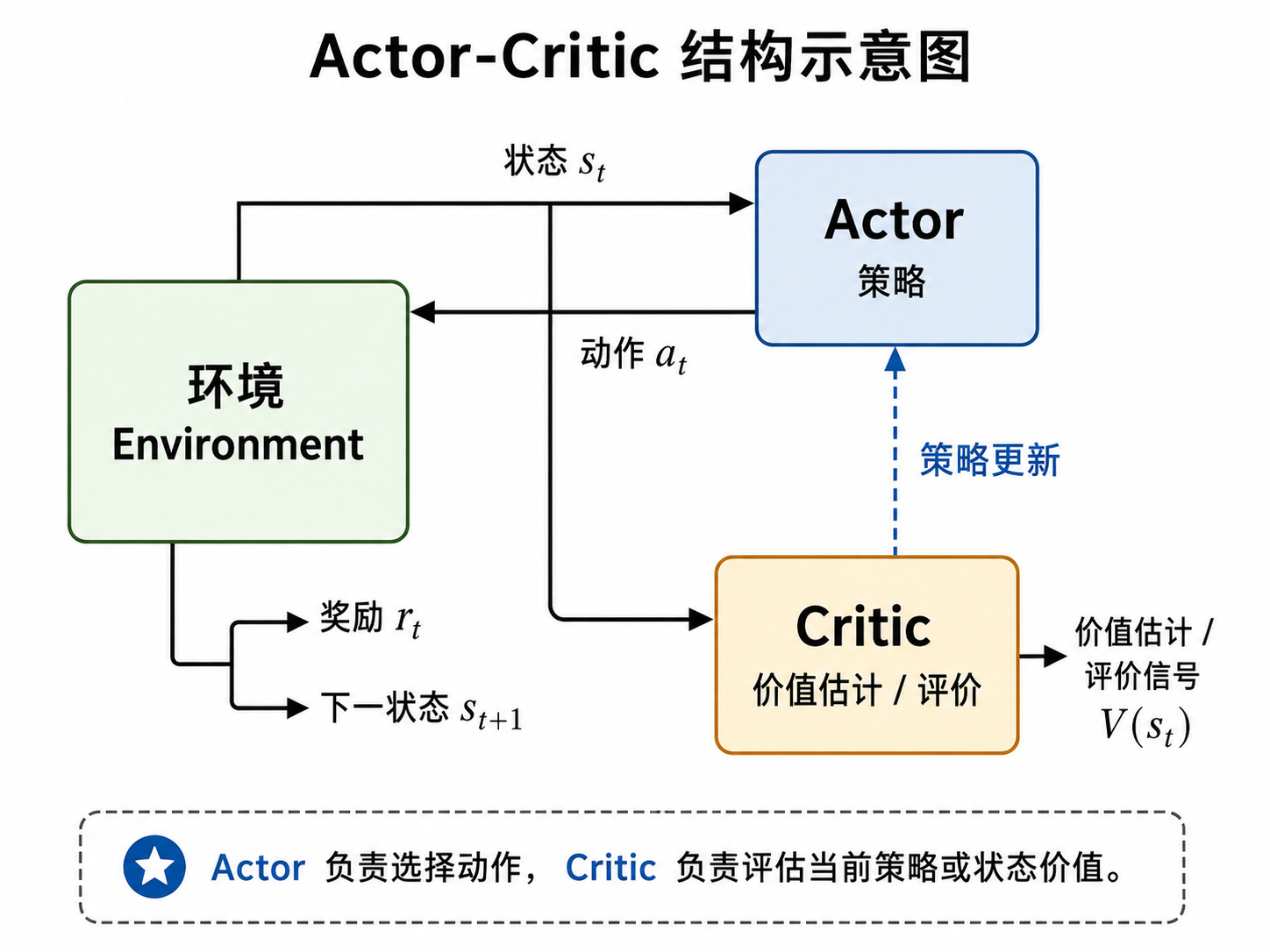
于是,行动器—评判器方法(Actor-Critic Method)可以定义为:一种同时学习参数化策略和参数化价值函数的强化学习方法。其中,Actor 负责输出策略,Critic 负责估计价值并评价 Actor 的行为。
从交互流程上看,Actor-Critic 的基本过程可以概括如下。
在时刻 $t$,智能体观察到状态 $s_t$。Actor 根据策略
$$ \pi(a\mid s_t;\boldsymbol{\theta}) $$采样或选择动作 $a_t$。动作作用于环境后,环境返回奖励 $r_t$,并转移到下一个状态 $s_{t+1}$。与此同时,Critic 根据当前价值函数
$$ V(s;\mathbf{w}) $$评价状态 $s_t$ 或这一步转移的好坏。随后,Critic 利用新的经验更新自己的价值估计,Actor 则利用 Critic 提供的评价信号更新策略参数。
这个结构的核心在于分工。
Actor 直接决定智能体如何行动,因此它承担策略学习的部分。它关心的是:在给定状态下,哪些动作应该被赋予更高概率。Critic 不直接选择动作,而是为 Actor 的行为提供评价。它关心的是:当前状态的价值估计是否准确,当前动作带来的结果是否好于预期。
因此,Actor-Critic 可以看作策略学习与价值学习的结合。和 REINFORCE 相比,Actor 仍然使用策略梯度思想更新策略;但更新时不再只依赖完整回报 $G_t$,而是借助 Critic 提供的价值估计来构造评价信号。和纯价值学习方法相比,Actor-Critic 不需要通过
$$ \arg\max_a Q(s,a) $$间接得到策略,而是直接维护一个可优化的策略函数。
这种结构带来的一个重要变化是:策略更新不再完全依赖回合结束后的完整回报,而可以利用一步转移中的价值估计进行更及时的更新。也就是说,Critic 把前面时序差分学习中的价值估计思想引入了策略梯度框架,使策略学习从纯蒙特卡洛式更新,逐渐走向可以边交互、边更新的形式。
这一点也是 Actor-Critic 在深度强化学习中非常重要的原因。它保留了策略梯度方法能够直接优化策略的优势,同时又引入价值函数来降低更新信号的方差,并提高经验利用的及时性。
一步 TD 误差
在 Actor-Critic 结构中,Critic 需要把价值估计转化为可以用于学习的评价信号。最常见的做法,是使用一步时序差分误差(One-step Temporal Difference Error)。设 Critic 用参数化函数
$$ V(s;\mathbf{w}) $$估计状态价值,其中 $\mathbf{w}$ 是价值函数参数。智能体在时刻 $t$ 经历一次转移:
$$ (s_t,a_t,r_t,s_{t+1}) $$根据这一步经验,可以构造一步 TD 误差:
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$这个式子可以分成两部分理解。当前 Critic 对状态 $s_t$ 的价值估计是
$$ V(s_t;\mathbf{w}) $$而根据刚刚观察到的一步经验,可以得到一个新的估计目标:
$$ r_t+\gamma V(s_{t+1};\mathbf{w}) $$其中,$r_t$ 是当前已经获得的即时奖励,$\gamma V(s_{t+1};\mathbf{w})$ 是对下一状态后续价值的估计。因此,$\delta_t$ 衡量的是当前价值估计和一步 TD 目标之间的差距。
如果 $\delta_t>0$,说明一步 TD 目标高于 Critic 原本对状态 $s_t$ 的估计,当前状态的价值可能被低估了;如果 $\delta_t<0$,说明一步 TD 目标低于原有估计,当前状态的价值可能被高估了。这样,$\delta_t$ 就可以作为 Critic 更新价值函数的误差信号。
从 Critic 的角度看,它希望让
$$ V(s_t;\mathbf{w}) $$逐渐接近
$$ r_t+\gamma V(s_{t+1};\mathbf{w}) $$因此可以通过最小化 TD 误差平方来更新价值函数参数。例如定义损失为
$$ L(\mathbf{w})=\delta_t^2 $$然后沿着损失下降的方向更新:
$$ \mathbf{w} \leftarrow \mathbf{w}- \beta \nabla_{\mathbf{w}} \left[ \delta_t^2 \right] $$其中,$\beta$ 是 Critic 的学习率。实际实现中,也常把一步 TD 目标视作固定目标,对
$$ \big(r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w})\big)^2 $$进行梯度更新。这里的重点不在于具体采用哪种优化器,而在于:Critic 通过减小 TD 误差,使自己的价值估计逐渐接近由真实经验给出的目标。
更重要的是,$\delta_t$ 还有第二层含义:它可以作为优势函数 $A_\pi(s_t,a_t)$ 的近似。
回顾优势函数的定义:
$$ A_\pi(s_t,a_t)=Q_\pi(s_t,a_t)-V_\pi(s_t) $$它表示在状态 $s_t$ 下选择动作 $a_t$,相对于该状态平均水平高多少。对于一次实际转移来说,
$$ r_t+\gamma V(s_{t+1};\mathbf{w}) $$可以看作对“执行动作 $a_t$ 后得到的回报”的一步估计,而
$$ V(s_t;\mathbf{w}) $$表示当前状态的平均价值估计。二者之差
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$就可以理解为:当前动作带来的结果,相对于 Critic 原本预期高多少。
这使得 $\delta_t$ 同时服务于两个学习过程。
对于 Critic,$\delta_t$ 是价值函数的预测误差,用来修正 $V(s;\mathbf{w})$。
对于 Actor,$\delta_t$ 是当前动作的评价信号,用来判断应该提高还是降低动作 $a_t$ 在状态 $s_t$ 下被选择的概率。
这样,Actor-Critic 的关键连接就建立起来了:Critic 通过时序差分方法学习价值函数,并把 TD 误差作为评价信号传递给 Actor;Actor 则利用这个评价信号进行策略梯度更新。
Actor 的策略更新
有了 Critic 给出的 TD 误差 $\delta_t$ 之后,Actor 就可以用它来更新策略参数。回顾策略梯度的基本形式,策略更新通常沿着
$$ \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$的方向进行。其中,$\pi(a_t\mid s_t;\boldsymbol{\theta})$ 表示当前策略在状态 $s_t$ 下选择动作 $a_t$ 的概率,$\boldsymbol{\theta}$ 是 Actor 的策略参数。
在 REINFORCE 中,这个方向前面乘的是完整回报 $G_t$:
$$ \boldsymbol{\theta} \leftarrow \boldsymbol{\theta} + \alpha G_t \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$而在 Actor-Critic 中,完整回报 $G_t$ 被 Critic 提供的评价信号替代。常见的一步 Actor-Critic 更新写作:
$$ \boldsymbol{\theta} \leftarrow \boldsymbol{\theta} + \alpha \delta_t \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$其中,
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$这个公式的含义可以直接从 $\delta_t$ 的符号来理解。
如果 $\delta_t>0$,说明当前动作 $a_t$ 带来的结果好于 Critic 原本的预期。此时更新会增加 $\log \pi(a_t\mid s_t;\boldsymbol{\theta})$,也就是提高策略在状态 $s_t$ 下选择动作 $a_t$ 的概率。换句话说,Actor 会倾向于在类似状态下更常选择这个动作。
如果 $\delta_t<0$,说明当前动作带来的结果低于 Critic 原本的预期。此时更新方向会反过来,使策略降低在状态 $s_t$ 下选择动作 $a_t$ 的概率。这样,Actor 在后续遇到类似状态时,就会减少选择该动作的倾向。
如果 $\delta_t$ 接近 $0$,说明当前结果与 Critic 的预期比较接近,Actor 的更新幅度也会较小。这表示当前动作既没有明显优于预期,也没有明显低于预期,策略没有必要做大幅调整。
因此,Actor 的更新可以理解为:
$$ \text{策略更新方向} = \text{动作概率的梯度方向} \times \text{Critic 给出的评价强度} $$其中,
$$ \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$决定“怎样改变参数才能提高当前动作概率”,而 $\delta_t$ 决定“当前动作概率应该提高还是降低,以及调整幅度有多大”。
这也说明 Actor-Critic 和 REINFORCE 的关系非常紧密。两者都使用
$$ \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$来更新策略。区别在于,REINFORCE 用完整回报 $G_t$ 作为权重,而 Actor-Critic 用 TD 误差 $\delta_t$ 作为权重。前者更接近蒙特卡洛式策略梯度,后者则把时序差分思想引入策略更新,使策略能够在交互过程中更及时地调整。
从算法结构上看,一次基本 Actor-Critic 更新包含两个同时进行的部分:
Critic 使用 $\delta_t$ 修正价值函数 $V(s;\mathbf{w})$,使价值估计更接近一步 TD 目标;
Actor 使用同一个 $\delta_t$ 更新策略 $\pi(a\mid s;\boldsymbol{\theta})$,使好于预期的动作概率上升,低于预期的动作概率下降。
这样,$\delta_t$ 就成为连接 Actor 和 Critic 的核心信号。Critic 通过它学习价值,Actor 通过它改进策略。Actor-Critic 的基本形式也由此完整建立起来。
与 REINFORCE 的对比
到这里,可以把 REINFORCE 和 Actor-Critic 放在同一条线索下比较。二者都属于策略梯度方法,都会直接更新参数化策略
$$ \pi(a\mid s;\boldsymbol{\theta}) $$并且策略更新中都包含同一个核心方向:
$$ \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$这个方向表示:如何调整策略参数,才能提高当前状态 $s_t$ 下选择动作 $a_t$ 的概率。真正的区别在于,这个方向前面乘上的评价信号不同。
在 REINFORCE 中,评价信号是完整回报 $G_t$:
$$ \boldsymbol{\theta} \leftarrow \boldsymbol{\theta} + \alpha G_t \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$这里的 $G_t$ 来自当前时刻之后的整段实际轨迹。因此,REINFORCE 属于蒙特卡洛式策略梯度方法。它直接用完整回报评价当前动作,不依赖价值函数估计,形式比较直接。但它通常需要等到回合结束后才能计算 $G_t$,更新具有延迟;同时,完整回报累积了后续轨迹中的随机性,方差通常较大。
在 Actor-Critic 中,评价信号换成了 Critic 给出的一步 TD 误差 $\delta_t$:
$$ \boldsymbol{\theta} \leftarrow \boldsymbol{\theta} + \alpha \delta_t \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$其中,
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$这里的 $\delta_t$ 只依赖当前一步奖励、下一状态价值估计和当前状态价值估计。因此,Actor-Critic 不必等待完整回合结束,就可以在每次转移之后进行更新。它把时序差分学习引入策略梯度,使策略学习具有更强的在线更新特征。
从这个角度看,REINFORCE 与 Actor-Critic 的差别可以概括为:REINFORCE 使用完整回报 $G_t$ 评价动作,Actor-Critic 使用 TD 误差 $\delta_t$ 评价动作。前者更接近蒙特卡洛方法,后者更接近时序差分方法。
这种变化带来了明显影响。
REINFORCE 的更新目标更加接近真实采样回报,因为 $G_t$ 是实际轨迹中完整计算出来的回报。但它的代价是更新不够及时,且方差较高。Actor-Critic 的更新更加及时,因为 $\delta_t$ 在一步交互后就可以计算出来;同时,由于 Critic 用价值函数估计替代了一部分未来回报,更新信号的方差通常低于直接使用完整回报。
不过,这种改进也引入了新的依赖。REINFORCE 不需要额外学习价值函数,而 Actor-Critic 需要 Critic 提供可靠的价值估计。如果 Critic 的估计偏差较大,Actor 接收到的评价信号也会受到影响。也就是说,Actor-Critic 用更低方差和更及时的更新,换来了对价值估计质量的依赖。
因此,Actor-Critic 可以理解为 REINFORCE 与价值学习的结合。Actor 保留策略梯度方法直接优化策略的特点,Critic 则引入价值函数近似,为 Actor 提供低方差、可在线计算的评价信号。这种结构也为后续许多深度强化学习算法提供了基本框架。
Actor-Critic 的优点与局限
Actor-Critic 方法的主要优点,来自策略学习和价值估计的结合。
首先,它比 REINFORCE 更新更及时。REINFORCE 需要等待完整回合结束,得到 $G_t$ 之后再更新策略;Actor-Critic 则可以在每次经历一步转移后,根据
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$立即更新 Critic 和 Actor。这样,经验不必等到回合结束后才被利用,学习过程更接近在线更新。
其次,它的更新信号方差通常低于直接使用完整回报。完整回报 $G_t$ 会累积后续整段轨迹中的随机性,而 TD 误差只使用一步奖励和价值估计。虽然这种做法引入了价值函数估计带来的偏差,但它通常能换来更平稳的更新信号。对于深度强化学习任务,这一点很重要,因为神经网络训练本身已经存在较强的不稳定性,过大的梯度波动会明显影响学习过程。
再次,Actor-Critic 保留了策略梯度方法直接优化策略的能力。Actor 显式维护
$$ \pi(a\mid s;\boldsymbol{\theta}) $$因此它可以自然处理随机策略,也更容易扩展到连续动作空间。相比只学习动作价值函数再取最大动作的方法,直接学习策略在许多控制任务中更加方便。
不过,Actor-Critic 也有自己的局限。
最核心的局限是 Critic 的估计质量会直接影响 Actor 的更新。如果 $V(s;\mathbf{w})$ 估计不准确,那么 TD 误差 $\delta_t$ 就不能可靠反映当前动作的好坏。此时 Actor 可能会提高不合适动作的概率,或者降低本应保留的动作概率。换句话说,Critic 提供的评价信号如果有明显偏差,Actor 的学习方向也会受到干扰。
此外,Actor 和 Critic 同时学习,会使训练过程更加复杂。Actor 的策略变化会改变采样到的数据分布,而 Critic 又要在不断变化的数据分布下估计当前策略的价值。Critic 的变化又会进一步影响 Actor 的更新信号。因此,二者之间存在相互影响,学习率、网络结构、更新频率等设置都会影响训练稳定性。
因此,Actor-Critic 并不能简单理解为“比 REINFORCE 更稳定的版本”。更准确地说,它用 Critic 引入了更及时、低方差的评价信号,同时也引入了价值估计偏差和双网络联合训练的复杂性。它的优势和局限都来自同一个来源:Actor 负责改进策略,Critic 负责估计价值,二者在同一训练过程中不断相互作用。
这也是为什么 Actor-Critic 成为许多深度强化学习算法的基础结构。后续的 A2C、A3C、PPO、DDPG、SAC 等方法,都可以在不同程度上看作对这一基本框架的扩展。它们可能改变优势估计方式、采样方式、策略约束方式或动作空间设定,但核心思想仍然围绕“用价值估计辅助策略更新”展开。
小结
本文从 REINFORCE 的局限出发,引出了 Actor-Critic 方法的基本思想。REINFORCE 直接使用完整回报 $G_t$ 作为策略更新信号,形式清晰,但需要等待回合结束,且 $G_t$ 的方差通常较大。为了降低方差,可以在回报中减去与动作无关的基线,例如状态价值函数 $V_\pi(s_t)$,得到
$$ G_t - V_\pi(s_t) $$这个量可以看作优势函数 $A_\pi(s_t,a_t)$ 的采样估计,用来衡量当前动作相对于当前状态平均水平的好坏。
但一旦使用 $V_\pi(s_t)$ 作为基线,就需要额外估计价值函数。Actor-Critic 正是在这里出现:Actor 负责学习策略
$$ \pi(a\mid s;\boldsymbol{\theta}) $$Critic 负责估计价值函数
$$ V(s;\mathbf{w}) $$并向 Actor 提供评价信号。
在最基本的一步 Actor-Critic 中,Critic 使用一步 TD 误差
$$ \delta_t = r_t+\gamma V(s_{t+1};\mathbf{w})-V(s_t;\mathbf{w}) $$来更新价值函数。这个误差既表示当前价值估计和 TD 目标之间的差距,也可以近似表示当前动作的优势。于是,Critic 可以通过最小化 TD 误差平方来更新 $\mathbf{w}$,Actor 则使用
$$ \boldsymbol{\theta} \leftarrow \boldsymbol{\theta} + \alpha \delta_t \nabla_{\boldsymbol{\theta}} \log \pi(a_t\mid s_t;\boldsymbol{\theta}) $$来更新策略参数。
这个公式体现了 Actor-Critic 的核心逻辑:如果 $\delta_t>0$,说明当前动作结果好于 Critic 的预期,Actor 应提高该动作概率;如果 $\delta_t<0$,说明当前动作结果低于预期,Actor 应降低该动作概率。
因此,Actor-Critic 可以看作 REINFORCE 与价值学习的结合。它保留了策略梯度方法直接优化策略的特点,同时利用 Critic 的价值估计提供更及时、通常更低方差的评价信号。它也带来了新的训练难点:Critic 的估计质量会影响 Actor 的更新方向,Actor 和 Critic 同时学习时也可能相互干扰。
Actor-Critic 的意义并不只在于这一个基础算法本身。更重要的是,它形成了后续许多深度强化学习算法的基本结构。A2C、A3C、PPO、DDPG、SAC 等方法虽然在具体目标、采样方式、动作空间和稳定化技巧上有所不同,但大多都延续了“Actor 学习策略,Critic 提供价值评价”这一基本框架。